
Objectif
Concevoir et prototyper un système de récolte de salade adaptable sur une base robotique
Pourquoi
Compenser le manque de main d’oeuvre dans les exploitations agricoles maraichères
Comment
Projet confié à 5 étudiants de 4ème et 5ème année du cycle ingénieur agronome, spécialisation AENT, et réalisé au sein d’AgriLab
Résultat clef
Conception et prototypage d’une système de coupe / préhension des salades
Qui
Etudiants : Alexis BACH, Henri FORGET, Dominique LEROUEIL, Olivier RAMSPACHER, Thomas ROLLET
Encadrement : Simon RITZ, Davide RIZZO, Andrii YATSKUL
Commanditaire : INSTAR Robotics
Durée
Septembre 2019 – Décembre 2020
Conception et prototypage d’un strip-till animé
CÉSAR : un outil automatisé pour la récolte de salade
Lancé en septembre 2019, le projet César a été réalisé par des étudiants du parcours agroéquipements et nouvelles technologies (AENT) d’UniLaSalle Beauvais. Il répond à un besoin identifié en maraichage salade : automatiser les chantiers de récolte et pallier le manque de main d’œuvre. Le développement de l’outil César s’est déroulé tout le long du parcours soit environ 18 mois.
La genèse du projet
Le projet a été commandité par une start-up, INSTAR Robotics. Cette dernière a créé une solution répondant aux besoins logistiques en horticulture, notamment pour les pépiniéristes. Il s’agit de TROOPER.

Voulant développer une solution pour l’agriculture, INSTAR s’est tourné vers UniLaSalle et ses étudiants. La première phase a donc été d’identifier un secteur agricole ayant une problématique pouvant être automatisée.
Des recherches bibliographiques et nos connaissances ont permis d’identifier un besoin en maraichage, notamment vis-à-vis de la culture des salades. À ce jour, la récolte est un chantier employant beaucoup de main d’œuvre, qui plus est étrangère.
Des événements tels que la pandémie du coronavirus ont mis en évidence la conséquence liée à la dépendance de cette main d’œuvre.
Objectifs
Le projet doit permettre au commanditaire d’avoir un outil fonctionnel, qui s’adapte facilement sur une base robotique existante. Étant open source, le projet pourra être repris par toute personne qui le souhaite ! Via un Wiki, les évolutions du projet, son coût et les différents choix y sont expliqués (plus d’informations ici).
Concernant les aspects techniques, les différentes séquences de César permettent la récolte de salade en champ. Pour cela, l’outil est capable de couper une salade qui se présente devant sa lame. Ensuite, il la saisit et la dépose dans une cagette située derrière la lame.
Au niveau pédagogique, les étudiants acquièrent et mobilisent différentes compétences (gestion de projet, veille stratégique, mécanique générale, CAO, communication). La présence d’INSTAR Robotics en tant que commanditaire du projet favorise les échanges professionnels et prépare les étudiants aux interactions en entreprise.
Marché et veille stratégique
Sur le marché, il existe des récolteuses automotrices qui nécessitent de la main d’œuvre. Du point de vue solution robotique, aucune n’est existante. César est donc une nouveauté en la matière.
Vers le prototype
Plusieurs ébauches ont été réalisées via des logiciels de conception assistée par ordinateur (CAO). A partir de celle-ci, les étudiants ont ensuite matérialisé et donné vie à César. Voici le prototype dans sa version finale.
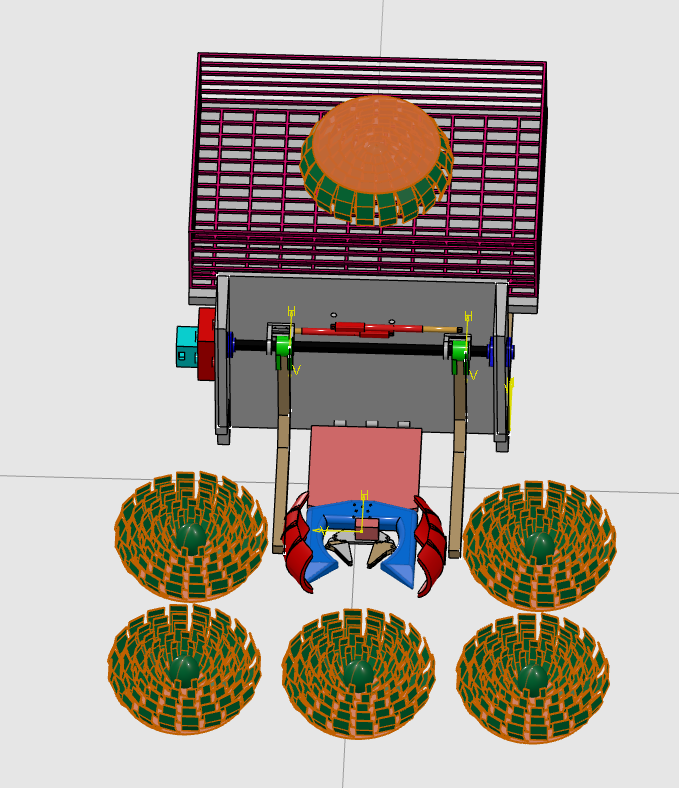
Grâce à l’impression 3D il est possible de réaliser des pièces solides, tout en ayant une belle esthétique, à moindre coût !
Quelles suites pour le projet ?
Avec le travail accompli par les étudiants, et leurs recommandations, INSTAR pourra reprendre et développer la suite de César, à sa guise !
En savoir plus :